DDReach
A learning based reachability analysis for stachastic dynamical systems. 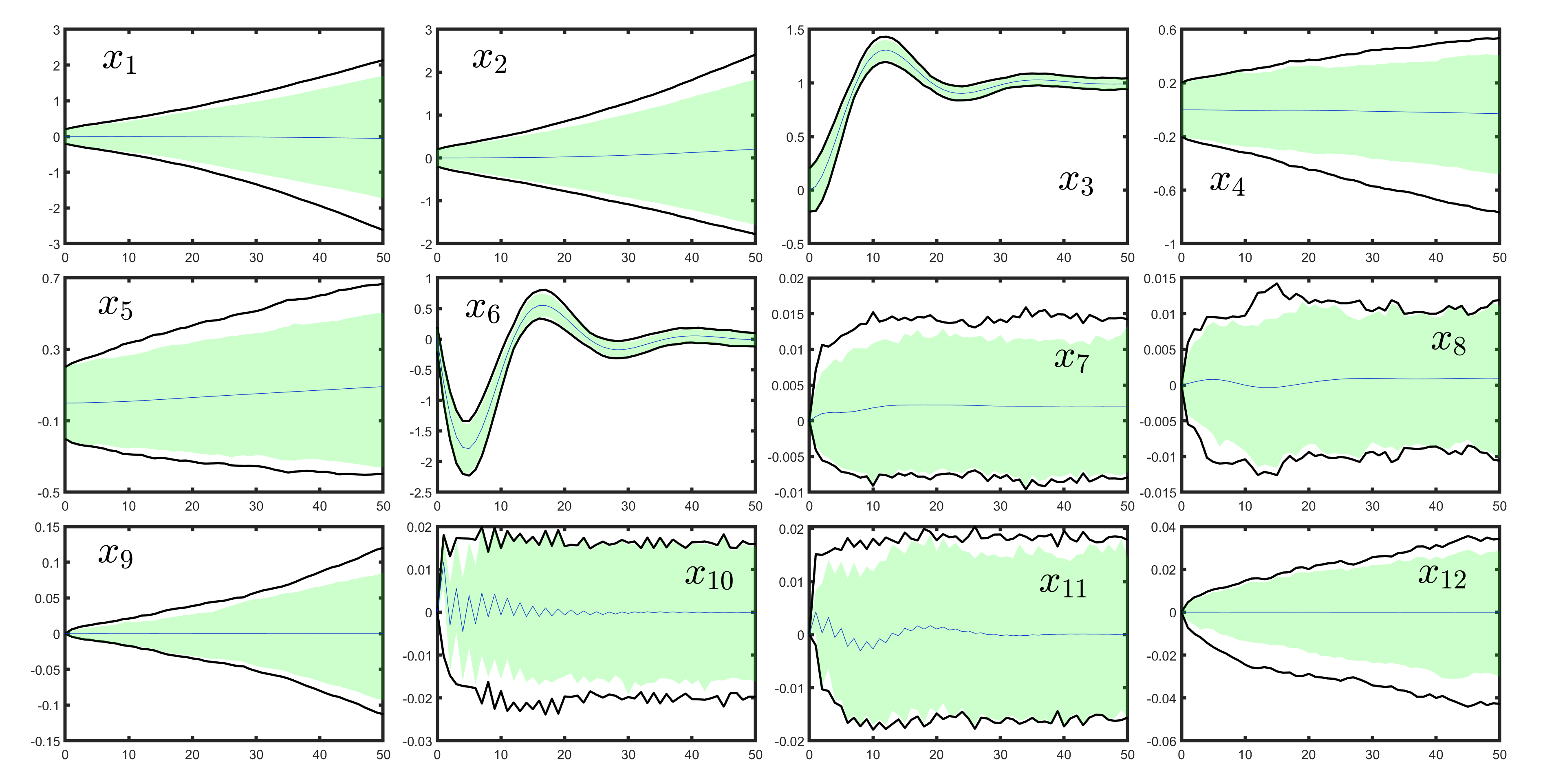

A learning based reachability analysis for stachastic dynamical systems.
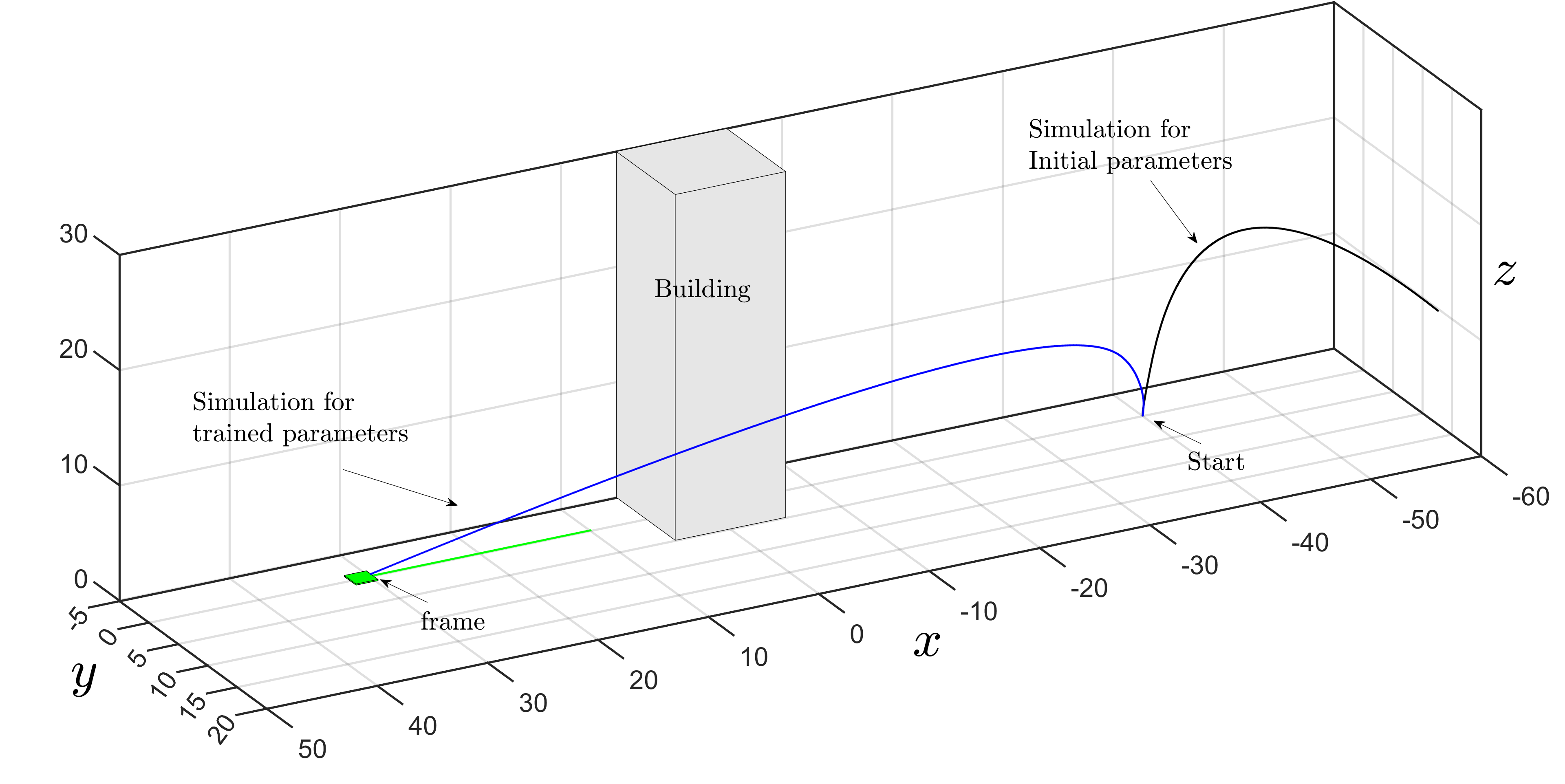
A novel and scalable smooth under approximation for STL quantitative semantics, with application to Neuro-symbolic training process for a satisficing Neural Feedback Policy. 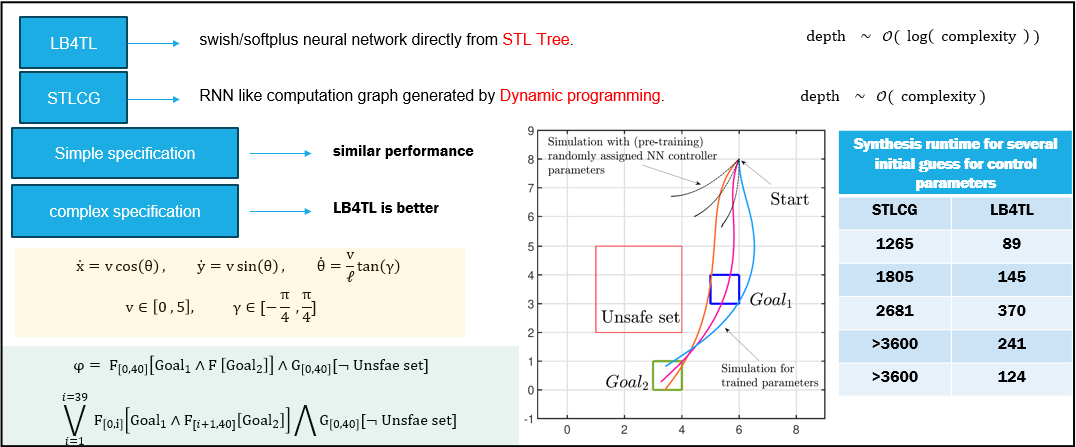
A learning based control systnesis for STL in the presence of model uncertainty. 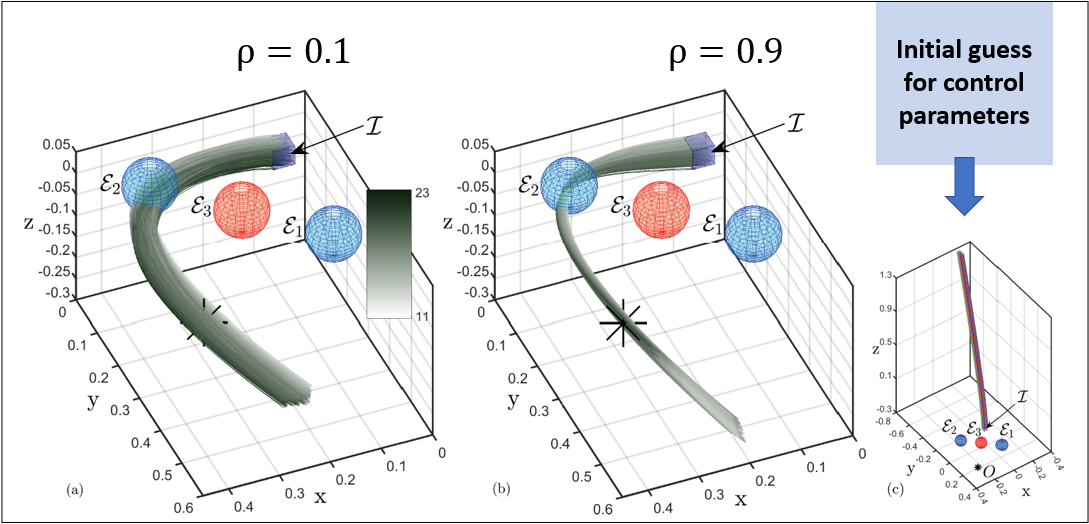
A deterministic formal verification framework for Signal Temporal Logics. 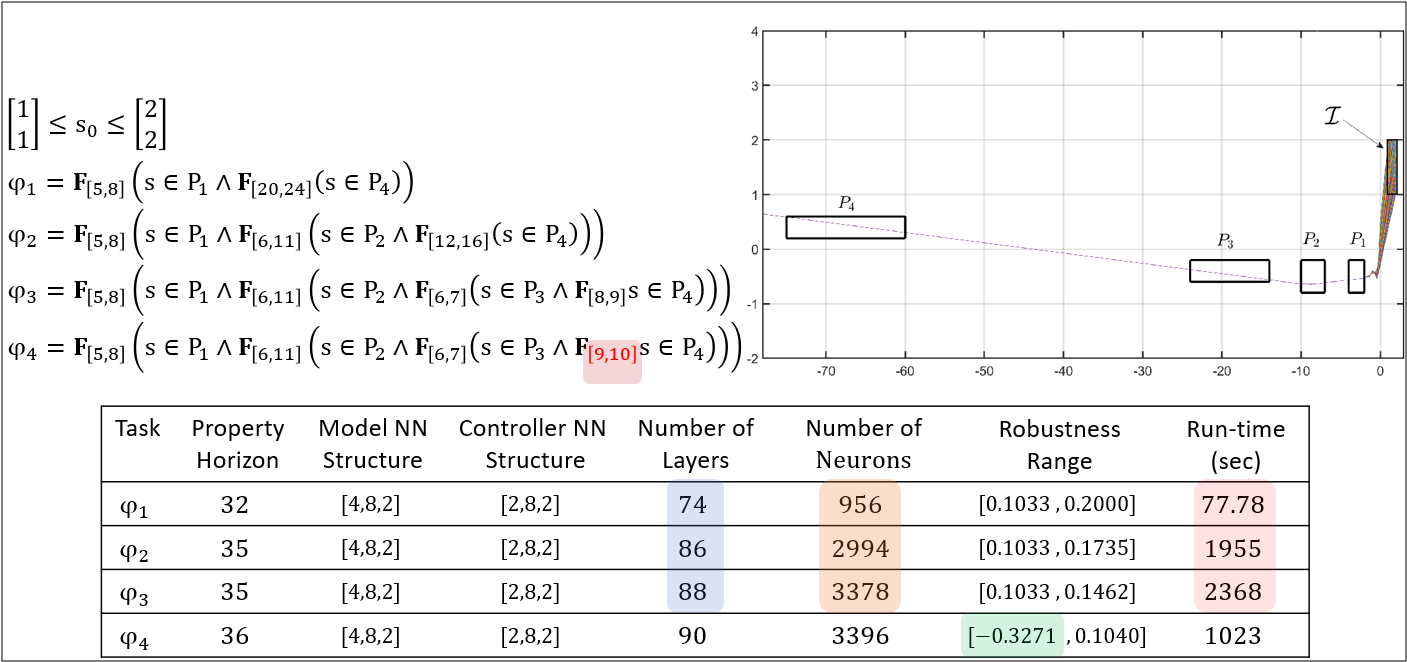
Neural Feedback Policy training for long time horizon tasks and high dimensional systems.